Le LiDAR est souvent évoqué dans les projets SIG, les appels d'offres et les discussions techniques — mais rarement expliqué. Cet article couvre le socle complet : ce que signifie le terme, comment la technologie est née et a évolué en soixante ans, quelles familles de capteurs existent, dans quels secteurs le LiDAR est utile, où se situent ses limites réelles, et comment accéder aux données — gratuitement dans la plupart des cas en France. C'est l'article 1 d'une série de deux. L'article 2 traite des formats de fichiers, de la lecture dans QGIS, de l'intégration dans un projet SIG et des traitements (MNT, MNS, MNH).
LiDAR : que signifie le mot ?
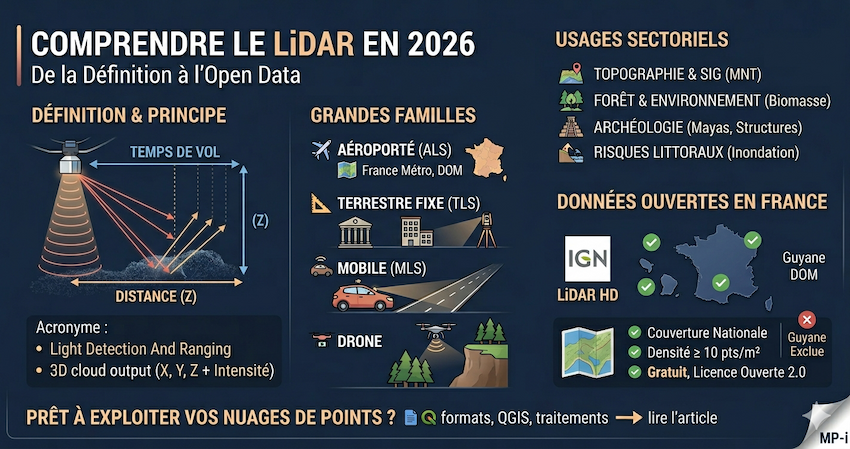
Le terme LiDAR est généralement développé comme Light Detection And Ranging — un acronyme rétroactif, construit sur le modèle de radar (Radio Detection And Ranging), et retenu comme définition officielle par l'ASPRS (American Society for Photogrammetry and Remote Sensing) et l'ISO.
Le principe physique est simple : un capteur émet une impulsion laser — infrarouge (1 064 nm ou 1 550 nm) pour les applications topographiques, vert (532 nm) pour le LiDAR bathymétrique —, mesure le temps écoulé jusqu'au retour de l'écho, et en déduit la distance à l'obstacle. Répété à très haute fréquence — de quelques dizaines de milliers à plusieurs millions d'impulsions par seconde selon le capteur —, dans toutes les directions d'un faisceau balayant, ce processus produit un nuage de points tridimensionnel — chaque point ayant des coordonnées X, Y, Z et des attributs associés : intensité du retour, numéro de retour (premier, deuxième, dernier), classification, couleur RGB si le capteur est équipé d'une caméra.
La logique est la même que celle du radar (ondes radio) ou du sonar (ultrasons) : émettre, attendre l'écho, mesurer. La différence est le support — la lumière laser, dont la longueur d'onde courte permet une résolution spatiale très fine, impossible à atteindre avec des ondes radio ou sonores.
LiDAR vs LiDAR HD : deux réalités à ne pas confondre
En France, le terme LiDAR HD désigne deux choses radicalement différentes selon le contexte :
Géospatial
Programme IGN LiDAR HD
- Couverture topographique nationale
- Densité ≥ 10 pts/m²
- Données ouvertes, gratuites
- Référence pour les projets SIG
Automobile
LiDAR HD véhicule autonome
- Perception temps réel
- Détection d'obstacles à grande vitesse
- Aucune vocation topographique
- Hors périmètre de cet article
Dans cet article, LiDAR désigne exclusivement la technologie topographique et géospatiale. Le LiDAR véhicule autonome n'est mentionné que pour éviter la confusion.
Naissance et évolution du LiDAR (1960–2026)
La trajectoire du LiDAR sur soixante ans est celle d'une technologie née dans les laboratoires de recherche militaire, longtemps inaccessible faute d'un outil de géoréférencement fiable, puis démocratisée brutalement par la convergence du GPS, de la miniaturisation et des drones grand public.
1960s
Invention du laser et premières mesures à distance
Le 16 mai 1960, Theodore Maiman démontre le premier laser opérationnel dans les laboratoires Hughes Research à Malibu — un cristal de rubis pompé optiquement produisant une impulsion cohérente à 694 nm. Dès mai 1962, Louis Smullin et Giorgio Fiocco du MIT réalisent la première mesure laser de la distance Terre–Lune dans le cadre du Project Luna See — sept ans avant qu'Apollo 11 ne pose pied sur la Lune.
1970s
Applications scientifiques et spatiales
Apollo 15 (1971) utilise un altimètre laser pour cartographier la surface lunaire. Les atmosphériciens développent les premiers LiDAR de sondage pour mesurer les aérosols, la couche d'ozone, les vents. Les systèmes sont volumineux, onéreux, réservés aux agences spatiales et aux laboratoires de recherche.
1980s
Bathymétrie côtière — le topographique reste inaccessible
Premières applications bathymétriques côtières aéroportées — des lasers verts capables de pénétrer l'eau peu profonde. Mais le LiDAR topographique commercial reste inaccessible : sans GPS civil précis, il est impossible de géoréférencer les points mesurés depuis un avion en mouvement. Connaître la distance à un obstacle ne suffit pas — il faut aussi connaître avec précision la position et l'orientation du capteur à l'instant de la mesure.
1990s
Tournant décisif : GPS + IMU = LiDAR topographique viable
Le couplage du GPS (rendu accessible au public civil à la fin des années 1980) avec les IMU (Inertial Measurement Units — centrales inertielles) résout le problème du géoréférencement. Au milieu des années 1990, les premiers scanners aéroportés commerciaux produisent 2 000 à 25 000 impulsions par seconde. L'IGN France intègre les premiers systèmes dans ses programmes de cartographie nationale.
2000s
Scanners terrestres fixes (TLS)
Apparition des scanners terrestres fixes montés sur trépied, permettant des relevés millimétriques de bâtiments, tunnels, sites industriels. Leica, FARO et Riegl s'imposent comme marques de référence.
2010s
LiDAR mobile (MLS) et cartographie linéaire
Le LiDAR mobile s'impose pour la cartographie de réseaux routiers, ferroviaires et linéaires côtiers. L'IGN déploie sa flotte Stéréopolis pour la numérisation des voies publiques françaises.
2015+
LiDAR véhicule autonome
La course aux véhicules autonomes propulse le LiDAR dans l'industrie automobile. Velodyne pionnier dans ce domaine, puis fusionné avec Ouster en 2023 pour former la société Ouster. Hesai, Luminar et Innoviz développent des capteurs haute fréquence spécialisés pour la détection d'obstacles.
2020+
Démocratisation drone — la PME peut faire du LiDAR
Miniaturisation des capteurs drone (< 500 g, compatibles DJI Matrice et équivalents). Des levés sur quelques km² deviennent accessibles à une équipe de deux personnes avec un budget maîtrisé. Le programme IGN LiDAR HD (2021) ouvre l'accès aux données nationales gratuitement.
Les grandes familles de capteurs LiDAR
Tous les LiDAR ne font pas la même chose. La famille d'appartenance d'un capteur conditionne la surface couvrable, la précision obtenue, le coût d'acquisition et les cas d'usage pertinents.
Le LiDAR HD véhicule autonome (Ouster, Hesai, Luminar) est une cinquième famille distincte — capteur de perception temps réel, non topographique. Hors périmètre de cet article.
À quoi sert le LiDAR — usages par secteur
Le LiDAR répond à un besoin fondamental : mesurer précisément la géométrie tridimensionnelle d'un environnement, que ce soit un terrain, un bâtiment, une forêt ou une infrastructure. Voici les principales applications sectorielles.
| Secteur | Usage principal | Capteur adapté |
|---|---|---|
| Topographie & génie civil | MNT haute précision, cubatures, implantation | ALS / Drone |
| Forêt & environnement | Hauteur de canopée, biomasse, inventaire forestier | ALS / Drone |
| Archéologie | Détection de structures sous végétation dense | ALS |
| Gestion du littoral & risques | Modélisation submersion, érosion côtière, PPRI | ALS / ALB |
| Énergie & réseaux | Cartographie lignes HT, éoliennes, photovoltaïque | Drone / MLS |
| Patrimoine & BIM | Relevé de façades, scan intérieur, maquette numérique | TLS |
| Mobilité autonome | Perception obstacles temps réel | LiDAR HD embarqué |
L'exemple qui a marqué les esprits : PACUNAM et les Mayas
En 2018, le projet PACUNAM LiDAR Initiative survole plus de 2 100 km² de jungle tropicale au Guatemala. Le résultat dépasse toutes les attentes : plus de 60 000 structures mayas sont détectées sous la canopée du Petén — pyramides, routes surélevées, systèmes d'irrigation, quartiers d'habitation entiers — totalement invisibles depuis le sol ou par photographie satellite optique. C'est la démonstration la plus spectaculaire de ce que le LiDAR permet là où aucune autre technologie ne peut aller : voir à travers la végétation dense pour révéler ce qui est en dessous.
Forêt et environnement : la canopée mesurée avec précision
En sylviculture, le LiDAR aéroporté permet de mesurer la hauteur précise de chaque arbre, d'estimer la biomasse à l'échelle d'un massif forestier entier, et de suivre l'évolution de la couverture végétale dans le temps. En Guyane, des programmes de recherche utilisent les données LiDAR pour quantifier le stock de carbone des forêts tropicales — un enjeu direct pour les politiques climatiques. C'est précisément dans ce contexte, sur un projet d'inventaire forestier en forêt guyanaise, que j'ai mesuré concrètement l'écart entre une approche photogrammétrique classique et un relevé LiDAR : là où la photogrammétrie s'arrête à la surface de la canopée, le LiDAR pénètre partiellement et fournit des informations sur la structure verticale de la végétation — hauteur de fût, densité de sous-bois, topographie du sol sous couvert.
Gestion des risques et du littoral
Le LiDAR est l'outil de référence pour les Plans de Prévention des Risques d'Inondation (PPRI). Un MNT précis à 10–20 cm est indispensable pour modéliser les zones de submersion. Les acquisitions répétées dans le temps permettent de suivre l'érosion côtière, le recul du trait de côte, la dynamique des dunes. En zone littorale, l'ALB bathymétrique permet de cartographier la continuité terre-mer dans une seule acquisition, du cordon dunaire jusqu'aux fonds à 15–20 m de profondeur.
Les limites du LiDAR
Le LiDAR est un outil puissant, mais pas universel. Connaître ses limites permet d'éviter des déconvenues sur des projets où il serait mal adapté, ou d'anticiper les contraintes dès le cadrage.
- 1 Météo — Le signal laser est diffusé par les gouttelettes d'eau en suspension. Pluie, brouillard dense et neige rendent les acquisitions aéroportées impossibles ou inutilisables. Les créneaux météo contraignent fortement la planification des campagnes, particulièrement en zones de montagne ou en milieu tropical.
- 2 Végétation très dense — Le laser pénètre partiellement la végétation grâce aux retours multiples. Mais une forêt tropicale très dense ou une haie compacte peut bloquer quasi-totalement le signal, réduisant la densité de points au sol à des valeurs insuffisantes. La compensation passe par une densité d'acquisition plus élevée — mais cela a un coût.
- 3 Surfaces réfléchissantes — L'eau calme, les vitres et les surfaces métalliques brillantes génèrent des données manquantes ou des artéfacts. Le LiDAR bathymétrique (laser vert 532 nm) est une réponse spécifique pour l'eau peu profonde — jusqu'à 15–20 m selon la turbidité et la couleur du fond.
- 4 Volume de données — Un vol LiDAR à 10 pts/m² sur 100 km² génère plusieurs centaines de Go de données brutes. Stocker, transférer et traiter ces volumes nécessite une infrastructure adaptée. C'est une contrainte souvent sous-estimée en phase de cadrage.
- 5 Compétences de traitement — Un nuage de points brut n'est pas directement exploitable. Il faut le classifier, le filtrer, générer les dérivés utiles (MNT, MNS, MNH), l'intégrer dans un SIG. Ces étapes nécessitent des outils dédiés (PDAL, QGIS, LAStools, CloudCompare) et une courbe d'apprentissage réelle.
- 6 Coût hors open data — Pour une zone non couverte ou une densité insuffisante, un vol sur commande coûte entre 1 000 et 10 000 € selon la surface, la densité requise et l'accessibilité de la zone. La location d'un scanner terrestre ou d'un kit drone LiDAR représente également un investissement significatif.
Données ouvertes vs données payantes
La question qui revient le plus souvent dans les projets SIG : faut-il acheter des données LiDAR, ou peut-on trouver ce qu'il faut gratuitement ? En France en 2026, la réponse est le plus souvent : les données existent et sont gratuites — à condition d'être dans la zone couverte par le programme IGN LiDAR HD.
Les sources open data à connaître
IGN LiDAR HD est le programme phare pour les projets français. Lancé en 2021 avec un budget de 60 millions d'euros dans le cadre du plan France Relance, il couvre la France métropolitaine, la Guadeloupe, la Martinique, La Réunion et Mayotte avec une densité minimale de 10 pts/m² (non garantie au-delà de 2 500 m d'altitude). La couverture complète est attendue d'ici fin 2026, avec un report partiel possible sur certaines zones. Les données — nuages de points classifiés, MNT, MNS et MNH dérivés — sont diffusées en open data sous Licence Ouverte Etalab 2.0 sur geoservices.ign.fr.
La Guyane est la seule exclusion du programme IGN LiDAR HD. Des données LiDAR y existent ponctuellement, produites par l'ONF, la DEAL ou des programmes de recherche scientifique, mais sans couverture systématique ni open data centralisé.
Consultez la carte interactive de diffusion dalle par dalle : macarte.ign.fr/carte/mThSup/diffusionMNxLiDARHD
| Source | Couverture | Densité | Accès |
|---|---|---|---|
| IGN LiDAR HD | France métro + Guadeloupe, Martinique, Réunion, Mayotte | ≥ 10 pts/m² | geoservices.ign.fr |
| USGS 3DEP | États-Unis | 1–8 pts/m² selon zone | usgs.gov/3dep |
| OpenTopography | Mondial (agrégateur) | Variable | opentopography.org |
| Copernicus / EEA | Europe (partiel) | Variable selon pays | land.copernicus.eu |
Quand les données payantes s'imposent
Il existe quatre situations où l'open data ne suffit pas :
Dans ces cas, les options sont : un vol sur commande auprès d'un prestataire spécialisé (bureau de géomètres, société de photogrammétrie), ou des plateformes commerciales comme Nearmap, Vexcel ou Airbus Defence & Space pour les zones à couverture commerciale régulière.
Ce qu'il faut retenir
Le LiDAR n'est plus une technologie réservée aux grandes agences nationales ou aux projets à budget exceptionnel. En 2026, la combinaison du programme open data IGN LiDAR HD (gratuit sur la quasi-totalité du territoire français), des capteurs drone accessibles et des outils de traitement open-source a fondamentalement changé l'équation.
La vraie barrière aujourd'hui n'est plus l'accès aux données — c'est la capacité à les exploiter : comprendre les formats, maîtriser les outils de traitement, intégrer les dérivés dans un projet SIG. C'est exactement ce que couvre l'article 2 de cette série : formats LiDAR (LAS, LAZ, COPC), lecture dans QGIS, workflow d'intégration, génération des MNT/MNS/MNH et panorama des outils open-source.
Un livre blanc synthétisant les deux articles sera disponible en téléchargement à la fin de l'article 2. Il reprendra l'ensemble de la série, enrichi d'un glossaire, d'un tableau comparatif des outils et des liens open data vérifiés.